Шаговый двигатель момент от тока - Теория шагового привода : Шаговая система : Компоненты

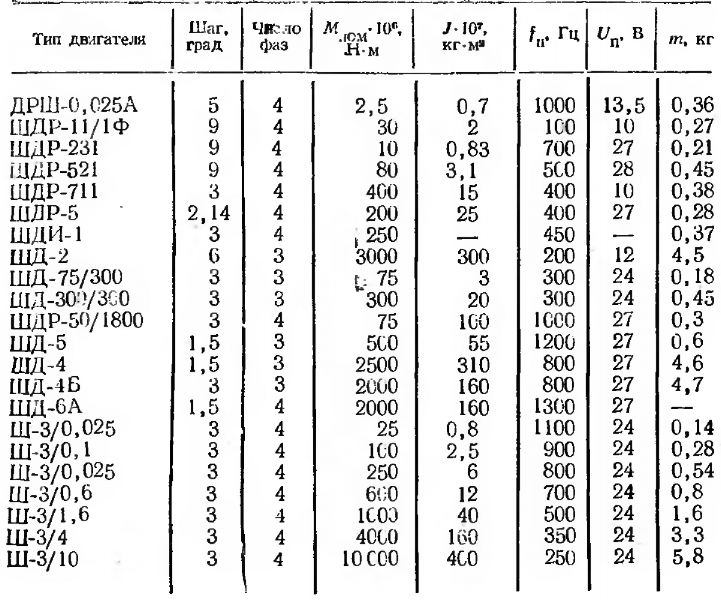
2.10. Основные характеристики шагового двигателя
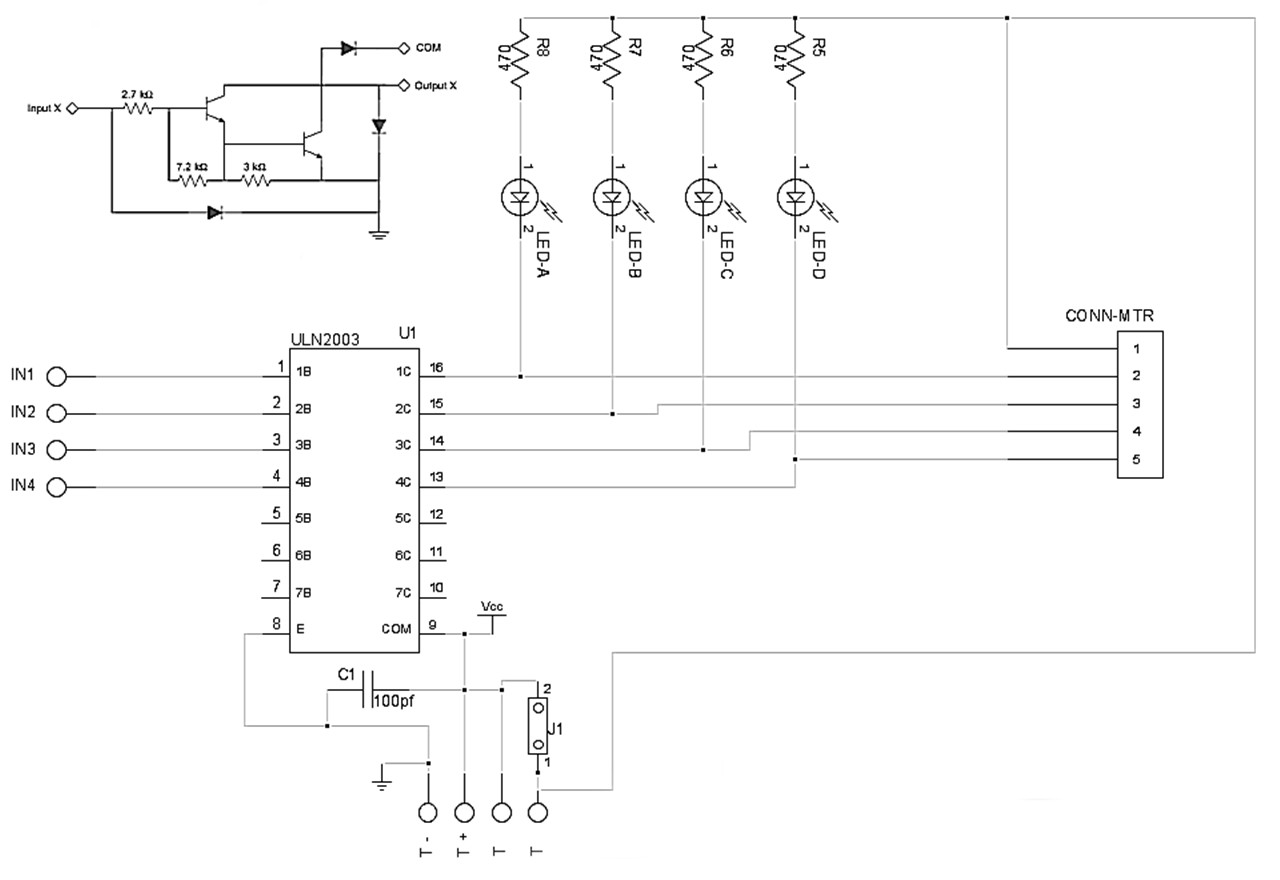
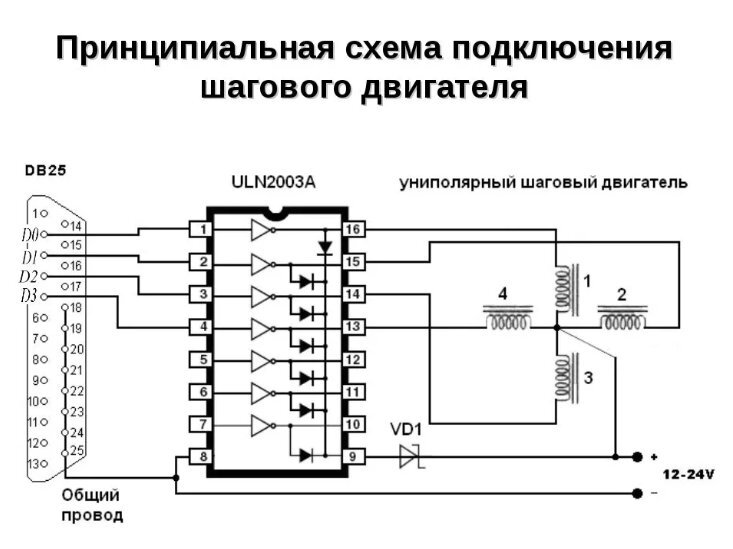
Шаговый двигатель - один из основных компонентов роботехники, ЧПУ-станко, 3D-принетеров и других автоматических систем. В этой статье рассмотрим что это такое, как его подключить и как управлять шаговым двигателем с помощью Arduino. На производстве и в быту при автоматической работе каких-либо механизмов часто требуется точное позиционирование рабочего органа или оснастки. Для этого могут использоваться серво приводы и шаговые двигатели. Эти два вида электропривода значительно отличаются, как по конструкции, так и по особенности работы и управления. В этой статье мы затронем тему работы с шаговыми двигателями с помощью Arduino и модуля для управления электродвигателями на базе ИМС ULN









Шаговый двигатель - что это и как им управлять?
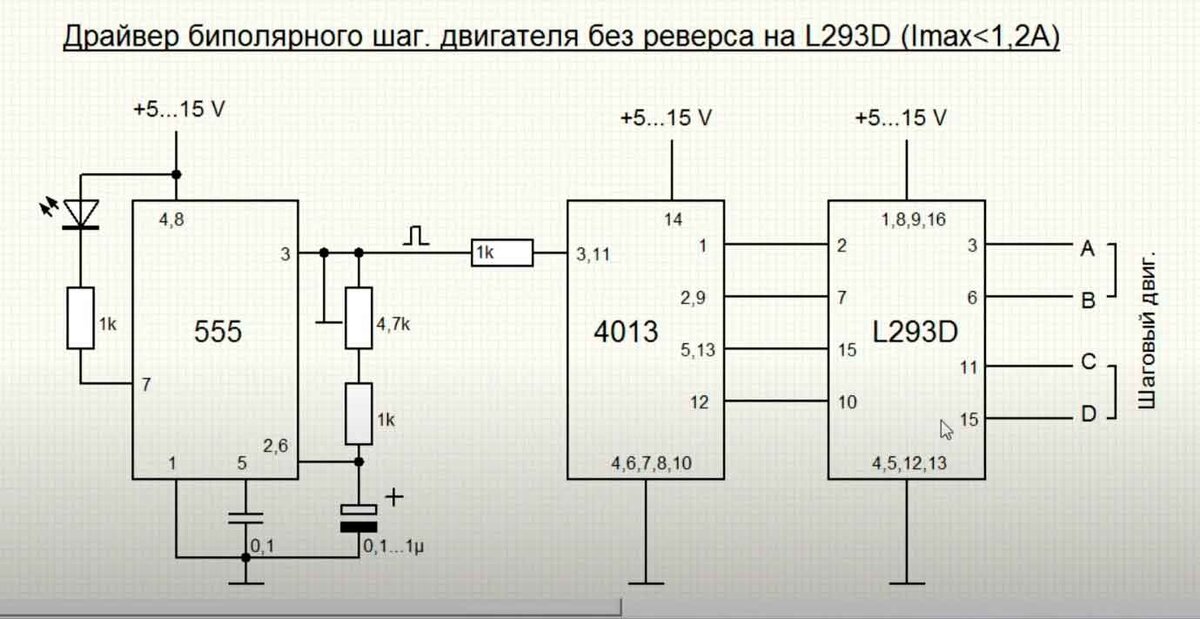
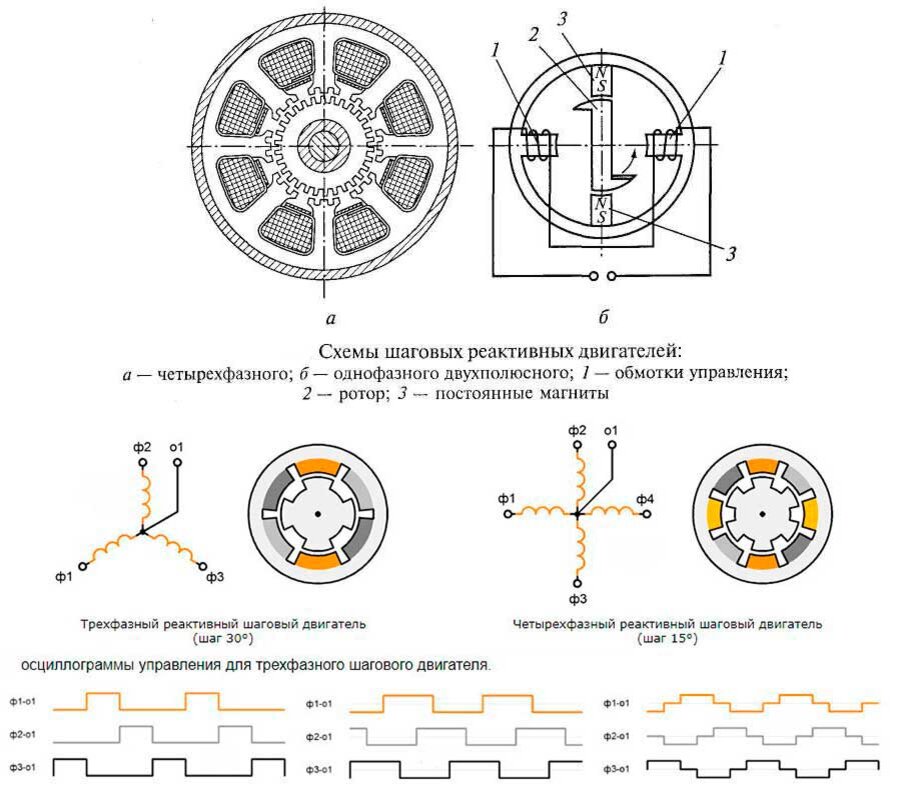
В статье описываются основные типы шаговых двигателей и особенности их применения в конкретных приложениях. Приведены практические схемы управления. В одной из предыдущих статей на тему управления двигателями постоянного тока [ 1 ] был кратко упомянут один из типов двигателей постоянного тока, а именно — шаговый двигатель, описание которого вышло за рамки статьи, и было ограничено одной лишь ссылкой.


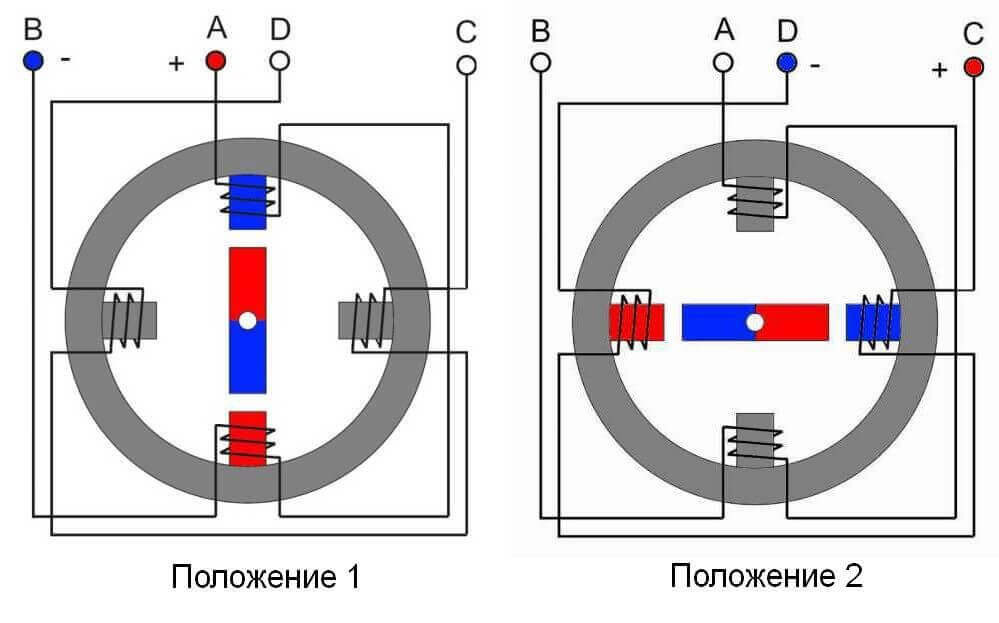

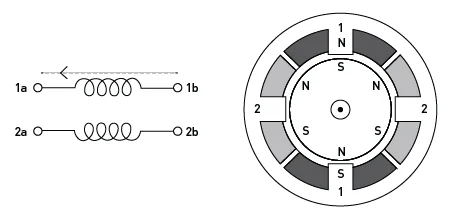


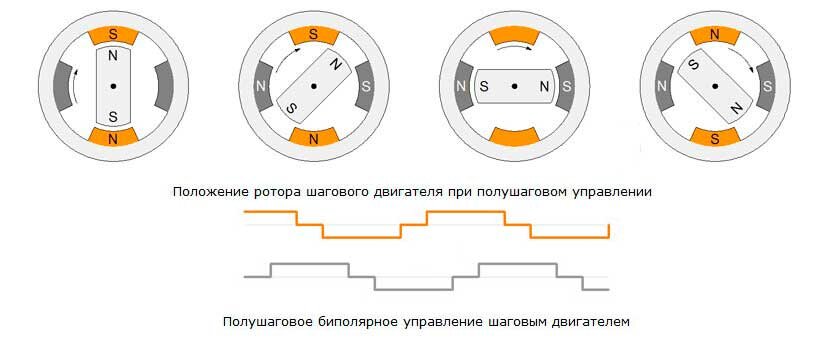
Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре. Обмотки ШД являются частью статора.